Basic Usage¶
This page assumes a successful installation of NQontrol and all dependencies.
Hello Servo Example¶
Here is a minimalistic, hello world-like example to show, how to
control a servo using the python terminal or a little script.
# Importing a ServoDevice is enough
from nqontrol import ServoDevice
# Create a new servo device object, connecting to adwin with the device number 0.
# Number 0 is reserved for a virtual mock device for testing.
sd = ServoDevice(0)
# Print the timestamp
print(f'Uptime {sd.timestamp}s')
# Get a servo object to control it.
s = sd.servo(1)
# enable in and output
s.inputSw = True
s.outputSw = True
WARNING:root:Running with mock device!
Uptime 0s
Using a signal generator for the input you will now get the same signal on the output. (That is true for signals below about 15 kHz.)
Apply a ServoDesign¶
To use a servo for a real control loop we want to have some filters. The full documentation is in the OpenQlab docs.
# Add an integrator and a lowpass
s.servoDesign.clear()
s.servoDesign.integrator(1e2)
s.servoDesign.lowpass(5e3)
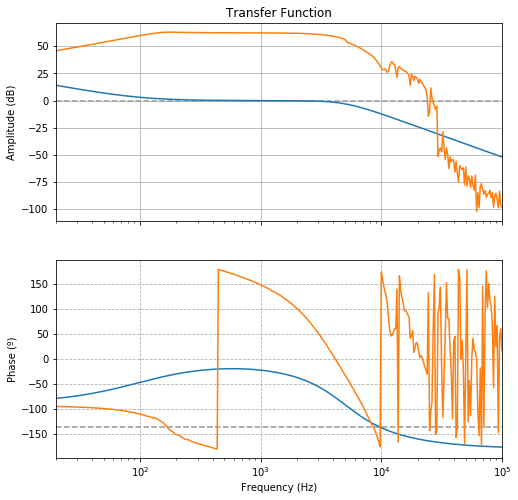
# Add transfer function of a real system
from openqlab import io
s.servoDesign.plant = io.read("transfer_function.csv")
# Plot how it looks analytically
import matplotlib.pyplot as plt
s.servoDesign.plot()
plt.show()
# Apply it to our servo
s.applyServoDesign()
# Control, what happens with the servo
s.filters
[[1.0015692243574656, -0.9999968584122811, 0.0, -0.9968633318334381, 0.0],
[0.005519854739225482, -1.7786050226116845, 0.8007755579457131, 2.0, 1.0],
[1.0, 0, 0, 0, 0],
[1.0, 0, 0, 0, 0],
[1.0, 0, 0, 0, 0]]
print(s.filterStates)
print(s.gain)
[True, True, False, False, False]
1.0015692243574656
Control Filters¶
# Disable all filters
s.filterStates = [False] * 5
# Enable the second (index = 1) filter
s.filterState(1, True)
print(s.filterStates)
[False, True, False, False, False]
Enable a Ramp¶
# Choose a slow ramp with a frequency of 1 Hz.
# Amplitude = 4
s.enableRamp(frequency=1, amplitude=4)
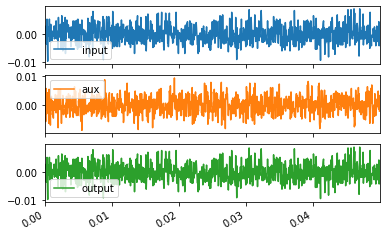
Take data and Plot¶
# Take data and store them in a pandas.DataFrame
data = s.takeData()
# Plot them using Matplotlib
data.plot(subplots=True)
Start Realtime Plotting¶
# Start plotting in a background process
s.realtimePlot(multiprocessing=True)
# disable plotting the output
s.realtime['ydata'] = ['input', 'aux']
# set constant y limit from -3 to 5
s.realtime['ylim'] = (-3, 5)
# stop realtime plotting
s.stopRealtimePlot()